








并聯機器人具有剛度高、速度快、柔性強、重量輕等優點,與串聯機器人一起構成工業機器人的重要部分。近幾年,隨著并聯機器人在食品、醫藥、電子等輕工業中的廣泛應用以及在物料搬運、包裝、分揀等方面無可比擬的優勢,已成為工業機器人需求增長的新生力量。
中國科學院寧波材料技術與工程研究所先進制造技術研究所精密運動與先進機器人團隊最新設計的四自由度并聯機器人,可以實現3T1R四個自由度的運動,是少自由度并聯機器人的創新設計之一,其主要特點為2條相同支鏈通過被動轉動副連接到動平臺上,且每條支鏈有2個相同分支通過安裝在基座上的移動副作為驅動。為進一步分析機構特點,采用螺旋理論驗證了該機構自由度的數目及機構的運動學特性,得到了其位置的封閉解,根據機構的運動學特性和構型特點,該機構位置正解的封閉解最多有8組解,位置反解最多有4組解,結果表明,運動學分析簡單是此并聯機器人的特點之一。此外,具有構型對稱、工作空間大、速度快且定位精度高的特點。相比于傳統的并聯機器人而言,它能夠實現XYZ三個方向的運動與一個繞Z軸方向的轉動,且在驅動方向工作空間可依作業需求擴展,增大了工作空間的范圍。
該并聯機器人樣機的每個支鏈采用了一定子兩動子的高精度直線電機作為驅動機構,結構簡單且電機定位精度達到微米級,此外,通過高強度的碳纖維復合材料作為支鏈的主要材料,有效降低了移動件的重量;控制系統采用了ABB的驅動器,通過PowerLink總線進行同步控制;通過基于運動學的離線軌跡規劃算法,該機構的運動學目前該樣機可達到XYZ三個方向的平動及繞Z軸方向的轉動,移動范圍分別是0.3m、1.2m和0.2m,其最大運動速度達到了1.6m/s,末端定位精度約為1mm,繞Z軸方向的轉動可以達到±120°,能夠廣泛應用于柔性化工廠的包裝、分揀等工序,具有很好的應用前景。
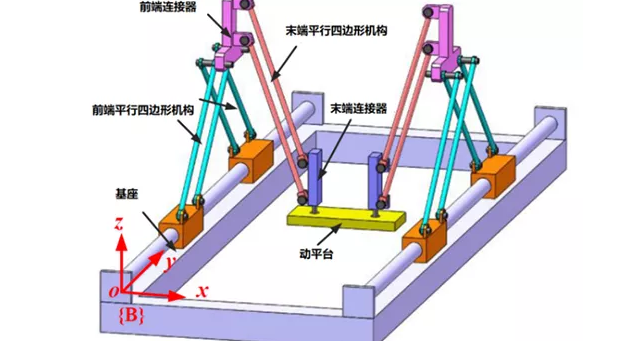
四自由度并聯機構結構圖
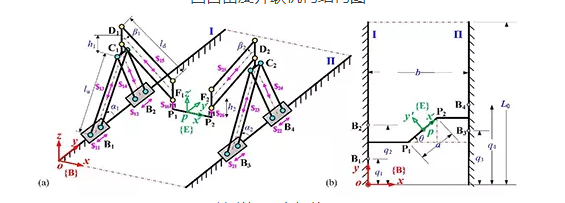
并聯機器人機構圖
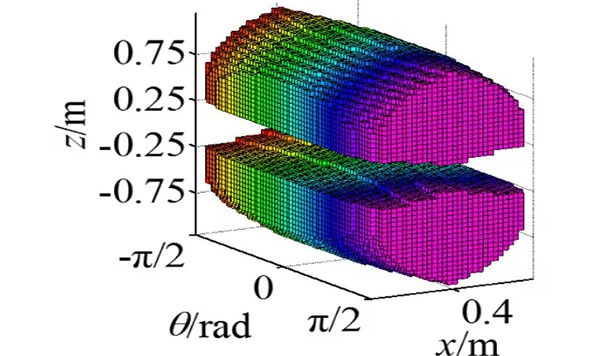
并聯機器人工作空間


