






裝備制造業(yè)是國民經(jīng)濟(jì)的重要支柱產(chǎn)業(yè),但產(chǎn)業(yè)大而不強(qiáng)導(dǎo)致我國許多企業(yè)面臨轉(zhuǎn)型升級,提高生產(chǎn)環(huán)節(jié)物流系統(tǒng)的自動化水平對企業(yè)提高生產(chǎn)效率、降低成本、提高產(chǎn)品質(zhì)量和管理水平起著顯著的作用,也是《國家重點扶持的高新技術(shù)領(lǐng)域》中的第八大類—高新技術(shù)改造傳統(tǒng)產(chǎn)業(yè)的扶持項目。2015年3月5日,李克強(qiáng)總理在全國兩會上作《政府工作報告》時首次提出“中國制造2025”的宏大計劃,全面提升中國制造業(yè)發(fā)展質(zhì)量和水平,實現(xiàn)制造業(yè)轉(zhuǎn)型升級;
近年來,自動導(dǎo)引車(AGV)的使用成為裝備制造業(yè)生產(chǎn)環(huán)節(jié)物流方案中的亮點,對提高企業(yè)生產(chǎn)效率、降低成本、提高產(chǎn)品質(zhì)量和管理水平起到了一定的作用,但由于其運動靈活性不夠,效率較低、復(fù)雜環(huán)境中作業(yè)困難,在很多場合的應(yīng)用受到了限制。因此本文將推薦一款可以沿平面內(nèi)360°任意方向精確運動的移動機(jī)器人—基于麥克納姆輪的全方位式移動AGV,可以替代傳統(tǒng)AGV小車,擁有更靈活、更高效的應(yīng)用價值。
一、麥克納姆輪簡介
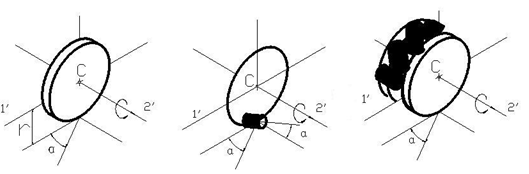
圖1 麥克納姆輪結(jié)構(gòu)圖
麥克納姆輪,最早由瑞典人Bengt Ilon于1973年發(fā)明,是一種結(jié)構(gòu)特殊的全向輪。麥克納姆輪外形像一個斜齒輪,輪齒是能夠轉(zhuǎn)動的鼓形輥子,輥子的軸線與輪的軸線成α角度。輥子有三個自由度,在繞自身轉(zhuǎn)動的同時又能繞車軸轉(zhuǎn)動,還能繞輥子與地面接觸點的轉(zhuǎn)動。這使得輪體本身也具備了三個自由度:繞輪軸的轉(zhuǎn)動和沿輥子軸線垂線方向的平動及繞輥子與地面的接觸點轉(zhuǎn)動。這樣,驅(qū)動輪在一個方向上具有主動驅(qū)動能力的同時,另外一個方向也具有自由移動的運動特性。輪子的圓周不是由普通輪胎組成,而是分布了許多小輥子,這些輥子的外廓線與輪子的理論圓周相重合,并且輥子能自由旋轉(zhuǎn)。當(dāng)電機(jī)驅(qū)動車輪旋轉(zhuǎn)時,車輪以普通方式沿著垂直于驅(qū)動軸的方向前進(jìn),同時車輪周邊的輥子沿著其各自的軸線自由旋轉(zhuǎn)。根據(jù)小輥子的偏向分為左旋麥克納姆輪和右旋麥克納姆輪。相比于萬向輪,麥克納姆輪具有靈活、精確、高效的特點,是一種可以控制的萬向輪。

圖2 麥克納姆輪實物圖
二、麥克納姆輪全方位移動平臺
麥克納姆輪的使用通常采用四個一組,其布置如下圖所示:
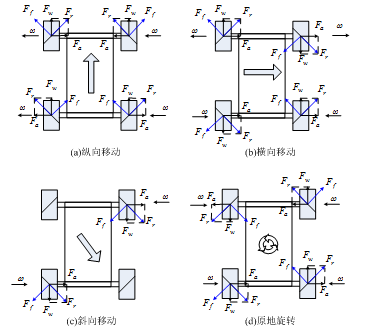
圖2 麥克納姆輪AGV全向移動原理
四個麥克納姆輪獨立驅(qū)動,通過對四個麥克納姆輪轉(zhuǎn)速和轉(zhuǎn)向的精確控制來實現(xiàn)搬運車的全向移動,包括前后直行、左右橫移、零半徑原地旋轉(zhuǎn)、指定半徑轉(zhuǎn)彎、任意方向直線移動等。其最大優(yōu)點在于其卓越的運動靈活性,能夠?qū)崿F(xiàn)真正意義上的全向移動,且不同運動方式之間的轉(zhuǎn)換迅速,非常適用于物料、零件、貨物的搬運工作,尤其是在運動空間要求較高(空間狹窄或者運動軌跡復(fù)雜)的場合具有出色的表現(xiàn),如空間擁擠的倉庫、大型零部件的轉(zhuǎn)運,工件運輸?shù)轿缓蟮木_調(diào)整等。麥克納姆輪在地面上轉(zhuǎn)動時,其與地面的摩擦力方向和車輪轉(zhuǎn)動方向不重合而是有一個夾角。四個麥克納姆輪摩擦力的組合力為AGV提供驅(qū)動力。其全向移動原理如圖2所示:
相比于普通的移動機(jī)器人,麥克納姆輪式全方位移動AGV有著其獨特的靈活運動優(yōu)勢,解決了兩大難題:
? 狹小空間內(nèi)的靈活穿梭
解決諸如S彎、直角彎等普通移動機(jī)器人“忘而卻步”的通過性問題、利用橫移才能通過的理論死角,不受空間、環(huán)境的約束;
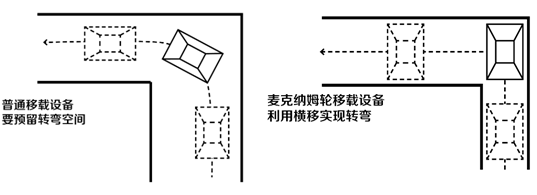
圖4 普通小車直角轉(zhuǎn)彎 圖5 全方位移動小車直角轉(zhuǎn)彎
? 平面內(nèi)任意方向的快速精確定位
解決“最后一米”的移動問題,使得原本在裝配、加工、運輸過程中需花費數(shù)十個小時完成的精確對位問題,輕松地利用一個動作瞬間完成。

傳統(tǒng)形式的AGV車輪通常采用聚氨酯輪,通過兩輪差動原理實現(xiàn)轉(zhuǎn)向功能,能夠?qū)崿F(xiàn)前、后、轉(zhuǎn)彎等運動功能,目前廣泛應(yīng)用于汽車、電子、物流等行業(yè)。麥克納姆輪AGV與傳統(tǒng)AGV相比各有優(yōu)缺點:麥克納姆輪AGV運動靈活,微調(diào)能力高,運行占用空間小,但是成本相對較高,結(jié)構(gòu)形式相對復(fù)雜,對控制、制造、地面等的要求較高,適用于空間狹小,定位精度要求較高、工件姿態(tài)快速調(diào)整的場合,傳統(tǒng)AGV結(jié)構(gòu)簡單成本較低,但是其運動靈活性差,在空間受限的場合無法使用,難以實現(xiàn)工件微小姿態(tài)的調(diào)整。適用于空間較大、工件到位后對位置姿態(tài)等要求不高的場合。兩者對比如下:
表1 傳統(tǒng)AGV和麥克納姆輪AGV對比
項目 | 傳統(tǒng)AGV | 麥克納姆輪AGV |
驅(qū)動輪形式 | 通常采用聚氨酯輪 | 麥克納姆輪 |
驅(qū)動輪數(shù)量 | 2個 | 4個 |
驅(qū)動組件數(shù)量 | 2組 | 4組 |
運動方向 | 前進(jìn)、后退、轉(zhuǎn)彎 | 前進(jìn)、后退、左右橫移、零半徑轉(zhuǎn)彎、任意方向斜行等 |
占用空間 | 大 | 小 |
運動靈活性 | 低 | 高 |
微調(diào)能力 | 低 | 高 |
成本 | 低 | 較高 |
控制系統(tǒng) | 簡單 | 復(fù)雜 |
結(jié)構(gòu)形式 | 簡單 | 復(fù)雜 |
制造要求 | 一般 | 較高 |
對地面環(huán)境的要求 | 較高 | 高 |
根據(jù)應(yīng)用場景和功能的不同,麥克納姆輪全方位移動AGV小車可分為幾種類型:
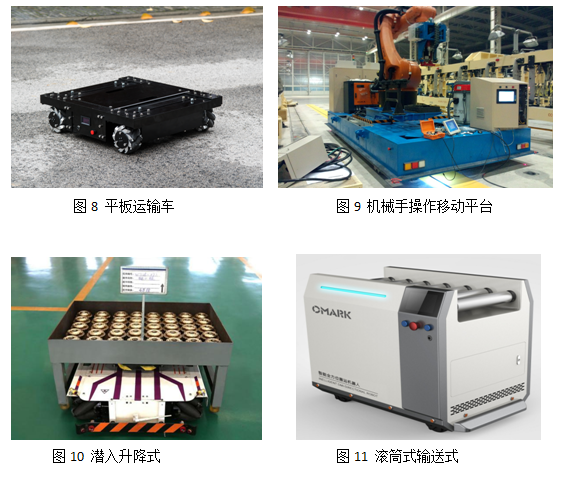
基本型AGV:可作為通用移動底盤,俗稱“平板車”,可將搬運的貨物直接放在平臺上進(jìn)行輸送,也可在底盤上進(jìn)行改造,配套移載設(shè)備;
升降型AGV:升降平臺或叉車結(jié)構(gòu)形式,用于貨架運輸、高空作業(yè),解決“最后一米”問題,快速對準(zhǔn);
滾筒型AGV:在基本型AGV的基礎(chǔ)上,加裝滾筒或輸送帶,可直接與生產(chǎn)車間流水線對接,代替人工完成上、下料的串聯(lián)工作;
操作型AGV:利用移動式的AGV與機(jī)械臂組合應(yīng)用,完成諸如焊接、抓取、鉆孔等生產(chǎn)動作,減少了同種操作設(shè)備的數(shù)量,增加了運動靈活性。
三、基于全方位移動平臺的智能物流系統(tǒng)
目前,國內(nèi)大部分汽車、電器等制造裝配生產(chǎn)線中單機(jī)自動化已接近國際先進(jìn)水平,但設(shè)備、工序間的串聯(lián),如物料轉(zhuǎn)運、上下料等操作仍然依靠大量的人力解決。而以多臺麥克納姆輪式AGV組成的全自動無人化運輸物流系統(tǒng)可節(jié)省20%空間,提高30%的運行效率,是“工業(yè)4.0”中智能物流環(huán)節(jié)的核心技術(shù),是實現(xiàn)各生產(chǎn)環(huán)節(jié)的無縫對接、工序與工序之間的串聯(lián)銜接、原料與成品的物流輸送與管理,減少人工重復(fù)勞動和出錯率,提高生產(chǎn)效率,對實現(xiàn)規(guī)范化生產(chǎn)過程管理起到重要作用,為早日實現(xiàn)“中國制造2025”的目標(biāo)奠定基礎(chǔ)。
全自動無人物流系統(tǒng)是利用多臺麥克納姆輪全方位移動AGV進(jìn)行群控和調(diào)度,一方面結(jié)合MES(制造執(zhí)行系統(tǒng))和WPS(倉庫管理系統(tǒng))數(shù)據(jù)共享,為某一個具體的物流任務(wù),提供最優(yōu)的AGV派送解決方案;另一方面,與自動化設(shè)備完美對接,起到設(shè)備、工序之間緊密串聯(lián)的作用,主要組成部分:
1)后臺管理系統(tǒng)與數(shù)據(jù)庫服務(wù)器
與MES(制造執(zhí)行系統(tǒng))、WMS(倉庫管理系統(tǒng))進(jìn)行數(shù)據(jù)交換,管理、監(jiān)控所有AGV小車的運行狀態(tài)和相關(guān)參數(shù),實時做出AGV調(diào)度決策,是整個系統(tǒng)的“大腦”;
2)工業(yè)以太網(wǎng)數(shù)據(jù)傳輸架構(gòu)
數(shù)據(jù)傳輸、共享的硬件保障,根據(jù)實際場地環(huán)境選擇相應(yīng)的網(wǎng)絡(luò)設(shè)備,覆蓋全車間并支持大數(shù)據(jù)交換;
3)全方位移動AGV小車
基于麥克納姆輪的全方位移動AGV搬運車,通過無線信號與系統(tǒng)通信,接受調(diào)用命令并反饋位置信息,自主導(dǎo)航到達(dá)指定地點,行進(jìn)過程中可自主避障,確保安全。
4) 呼叫基站
任務(wù)的產(chǎn)生信號,由具體工位的操作人員直接呼叫,或結(jié)合生產(chǎn)現(xiàn)場監(jiān)控系統(tǒng)自動判斷;
5)路徑識別線
AGV小車的自動導(dǎo)引軌跡,實現(xiàn)AGV小車的自主導(dǎo)航
6)定位地標(biāo)
AGV小車在岔路選擇、目標(biāo)點定位的判斷依據(jù);
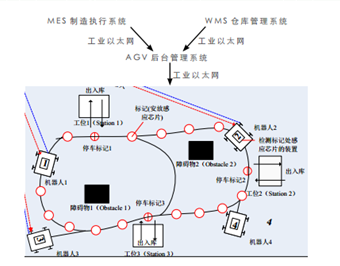
圖12 麥克納姆輪AGV物料輸送與存儲系統(tǒng)示意圖
系統(tǒng)工作流程大致如下:
(1)上位機(jī)系統(tǒng)通過無線局域網(wǎng)和AGV、生產(chǎn)設(shè)備、自動存儲貨架等進(jìn)行通訊;
(2)生產(chǎn)設(shè)備輸出端發(fā)送輸送請求給上位機(jī)系統(tǒng),上位機(jī)經(jīng)過處理后發(fā)送調(diào)度命令給AGV,派遣合適的AGV去取貨;
(3)AGV自主導(dǎo)航至取貨點,AGV和生產(chǎn)設(shè)備物料輸出端對接,完成自動接貨后將貨物送到自動物料暫存臺架相應(yīng)入庫位置;
(4)AGV和自動存取貨架入庫位對接,將貨物自動輸送入庫,自動存取貨架自動將貨物輸送到空位。
(5)AGV回到初始位置,自主或人工進(jìn)行充電,并等待下一條命令,動作依次循環(huán)。
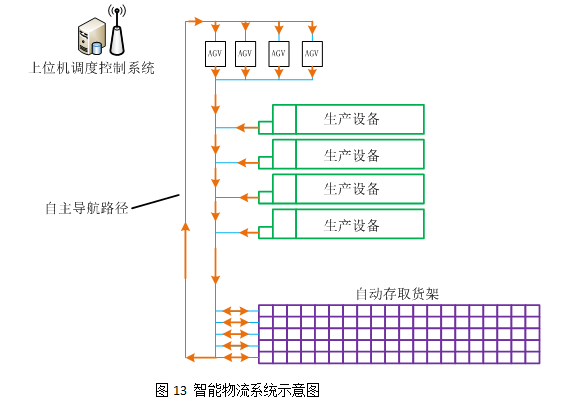
圖13 智能物流系統(tǒng)示意圖


